ติด GPS บนเรือ
ติด GPS บนเรือ ได้รับการออกแบบ สำหรับความหลากหลายของเรือ ดังเช่นว่า เรือ ริมฝั่ง เรือประมง แล้วก็อื่นๆ, Matsutec HP33 เป็นทางทะเล นำทาง GPS ระดับสูงที่ให้ ความถูกต้อง รวมทั้งเชื่อถือได้ เพื่อ ปรับปรุง ตำแหน่ง 50 ช่อง รับสัญญาณ GPS ด้วยเทคโนโลยี แบบบูรณาการ SBAS ตำแหน่งที่ สามารถคำนวณได้ 2 เมตรขึ้นไป ได้อย่างแม่นยำ จอสี 4.3 นิ้วที่มีขนาดใหญ่ ได้รับการออกแบบทนกับละอองน้ำสมุทร หน่วยความจำ” Matsutec HP- 33″
8 เหตุผลที่ควรเลือกใช้บริการ GTS
ติด GPS รถยนต์
ประสบการณ์มากกว่า 8 ปี
การันตีด้วยประกาศนียบัตรมากมาย
ทีมวิศวกรชั้นนำระดับประเทศ
พัฒนาซอฟต์แวร์ระบบโลจิสติกส์ให้ทันสมัยอยู่เสมอ
Call Center 24 ชั่วโมง
โทรกลับหาลูกค้าทุกสายหากคู่สายเต็ม
ศูนย์บริการมืออาชีพมากกว่า 50 จังหวัด
ให้ลูกค้ามั่นใจสามารถเข้าแก้ไขได้ทุกที่
ผ่านการรับรองกรมการขนส่ง
ออกใบรับรองได้ภายใน 1 ชั่วโมง
รับประกันอุปกรณ์ตลอดอายุการใช้งาน
ภายใต้สัมปทาน 3G
โปรแกรมใช้งานง่ายเพียง 2 คลิ๊ก
ตรวจสอบข้อมูลได้อย่างรวดเร็ว
บริการหลังการขายดีเยี่ยม
พูดคุยเป็นกันเองไม่ทอดทิ้งลูกค้า
มีความรู้และมีความเข้าใจใน การจัดเก็บ ได้ถึง 3,000 จุด ติดตาม 10,000 จุด และ 100 ทาง ถึง 30 จุด แต่ละ ” Matsutec HP33 ” ให้ข้อมูล การเดินเรือและก็การ แสดงผลได้นานาประการของต้นแบบ จำนวน และก็ ทางภูมิศาสตร์ ที่ต้องการโดย ผู้ใช้ สลับระหว่าง พลอตเตอร์ ทาง พวงมาลัย, นำร่อง ข้อมูล ดาวเทียม แล้วก็ สองโหมด ที่ผู้ใช้ระบุ ใช้ ง่ายต่อการ ใช้ตัวควบคุมคุณลักษณะทั่วไปโหมดการแสดง: พลอตเตอร์ ถนนหลวง พวงดอกไม้ ข้อมูล Nav , ดาวเทียม , Display1 ผู้ใช้งาน ผู้ใช้ Display2เตือน : มาถึง , Anchor นาฬิกา, XTE , ความเร็วของ SBAS เวลา การเดินทาง , เข็มฉาย : ฉาย Mercatorขนาด แปลง: 0.01nm – 320nmแหล่งพลังงาน: 12-24 VDC , 0.24 – 0.12Aจีพีเอส / SBASจีพีเอส : ช่อง 50 , C / รหัส
SBAS : WAAS , EGNOS , MSAS , GAGANรับ ความถี่: L1 ( 1575.42 MHz)เริ่ม เย็น: 32sเริ่มที่ น่าสนใจ : 1sความเร็ว การต่อว่าดตาม: 500m / sระดับความสูง : 50000m แม็กซ์
Dynamics : 4G แม็กซ์
Geodetic ระบบ : WGS -84 (และก็ อื่นๆ) เครื่องติดตาม ความเที่ยงตรงของ GPS แนวราบ: 2.5mความถูกต้องแน่ใจ SBAS แนวยาว: 2.0mความถูกต้อง ของ Velocity : 0.1m / sรายการ ความถูกต้องแน่ใจ : 0.5 องศาการแสดงผลขนาดจำสำหรับแสดงผล : 4.3 นิ้ว สี จอแอลซีดีแสดงผลลัพธ์ความละเอียด : 480×272ความสว่าง : 500cdแสดงผล ระบบสัมผัส ไม่หน่วยความจำ
3000 ติดตาม เรือ
10,000 Marks Waypoints และก็ ด้วย ความเห็น
100 เส้นทาง 30 Waypoints / ทาง
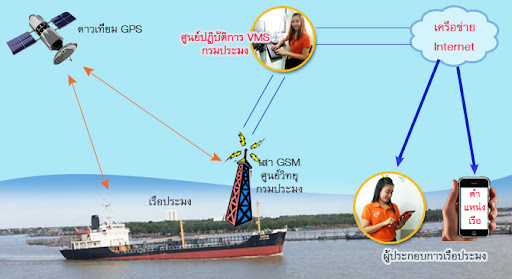
ดาวเทียมแต่ละดวงจะติดตั้งนาฬิกาอะตอมซึ่งตั้งเวลาไว้ให้ตรงกันทุกดวง
ดาวเทียม GPS จะถ่ายทอดสัญญาณในรูปของคลื่นวิทยุตลอดระยะเวลา คลื่นวิทยุที่ว่า นี้ จะส่งออกมาสองความถี่ คือ L1 = 1.2276 GHz และ L2 = 1.57542 GHz (ที่เรียก L1/L2 ด้วยเหตุว่าเป็นความถี่เขต L-Band)
ดาวเทียมทุกดวงจะมีวงจรสำหรับสร้าง Pseudo Random Code ออกมาด้วย bit rate 1.023 Mbps แม้กระนั้น code จะนานับประการตาม Algorithm ที่เลือกใช้ ส่วนตัว Code นี้จะ นำ มา Modulate กับ Carrier L1/L2 แล้วก็ส่ง ค่า มา ยัง แผ่นดิน การ Modulate Pseudo Random Code กับ L1/L2
ทำให้สัญญาณวิทยุอื่นๆไม่อาจจะ Synchronize กับ L1/L2 ได้ ดาวเทียม GPS ทุกดวงก็เลยสามารถใช้ความถี่ในการส่งสัญญาณเพียงแต่ชุดเดียว เพราะ Pseudo Random Code ที่ดาวเทียมแต่ละดวง Generate ขึ้นมา จะเป็นตัวบ่งชี้ได้ว่าสัญญาณที่ Receiver ได้รับมาจากดาวเทียมดวงไหน
และสัญญาณที่ดาวเทียม GPS ส่งมานี่เองที่จะเอาไปคำนวณหาตำแหน่งบนพื้นโลกได้เครื่องรับ GPS Receiverเครื่องรับ GPS Receiver มีบทบาทหลักๆก็คือรับสัญญาณจากดาวเทียม แล้วมาแปลงเป็นพิกัดของตำแหน่งที่มันอยู่บนพื้นโลก สิ่งที่ GPS Receiver สามารถคำนวณรวมทั้งให้คำตอบจะมี 3 ค่าหมายถึงพิกัด ความเร็วสำหรับการเคลื่อนที่ แล้วก็ เวลา ส่วนฟังก์ชันอื่นๆดังเช่นว่าตำแหน่งบนแผนที่
ระยะทางระหว่างสองจุดบนพื้นแผ่นดิน หรือหาในเวลาที่จะไปถึงจุดหมายปลายทาง อื่นๆอีกมากมาย จะเป็นตัวเสริมความรู้ความเข้าใจของระบบซึ่งแล้วแต่ว่าบริษัทที่ผลิต GPS Receiver ดังเช่นว่า GARMIN, SUZUKI, ECHOTEC, จะใส่มาให้ข้างใน เฉพาะ โดย GPS Receiver มีส่วนสำคัญๆคือ
1. วงจรรับสัญญาณ GPS ซึ่ง Lock ความถี่ให้ตรงกับ L1/L2 ของ วงจรจะกระทำการ Demodulate เพื่อได้ Pseudo Random Code ที่ดาวเทียมส่งมา
2. ปูม (Almanac) ของดาวเทียมซึ่งเก็บเป็นวิถีโคจรของดาวเทียมแต่ละดวง ทำให้รู้ได้ว่าขณะเวลานั้นๆดาวเทียมอยู่ที่ตำแหน่งไหนบนท้องฟ้า
3. Pseudo Random Code Generator อยู่ภายในตัว GPS Receiver เป็นตัวสร้าง Code ที่ตรงกับที่มีอยู่ในดาวเทียม GPS แต่ละดวง
4. Microprocessor ปฏิบัติภารกิจสำหรับในการประมวลผลข้อมูล และก็คำนวณหาตำแหน่ง ความเร็ว รวมทั้งเวลาการหาตำแหน่งบนพื้นแผ่นดินเริ่มจากตัว GPS receiver จะตรวจจากปูมที่บันทึกอยู่ใน Receiver เพื่อหาว่าดาวเทียม GPS อยู่ที่ตำแหน่งใดบนท้องฟ้าในขณะนั้น ต่อจากนั้นก็หาสัญญาณวิทยุที่ถ่ายทอดมาจากดาวเทียม
โดยธรรมดา ไม่ว่าจุดใดบนโลกจะมองเห็นดาวเทียม GPS ได้ระหว่าง 6 – 9 ดวง แต่สัญญาณวิทยุนี้ จะ อ่อนมาก ถ้าเกิดมีอะไรมาบัง (อย่างเช่น อาคารสูงๆหรือภูเขา) ตัว Receiver ก็จะรับสัญญาณไม่ได้ ที่สำคัญคือ..จึงควรใช้ดาวเทียมอย่างน้อย 4 ดวงสำหรับในการหาตำแหน่งบนพื้นแผ่นดิน
สนใจ เเอดไลน์ LINE : @GeniusGPS